Journey
worked as flight controls intern with the most ambitious and hardworking people on autonomous planes
1. Helped in making a quadrotor with in-house custom canegrass material.

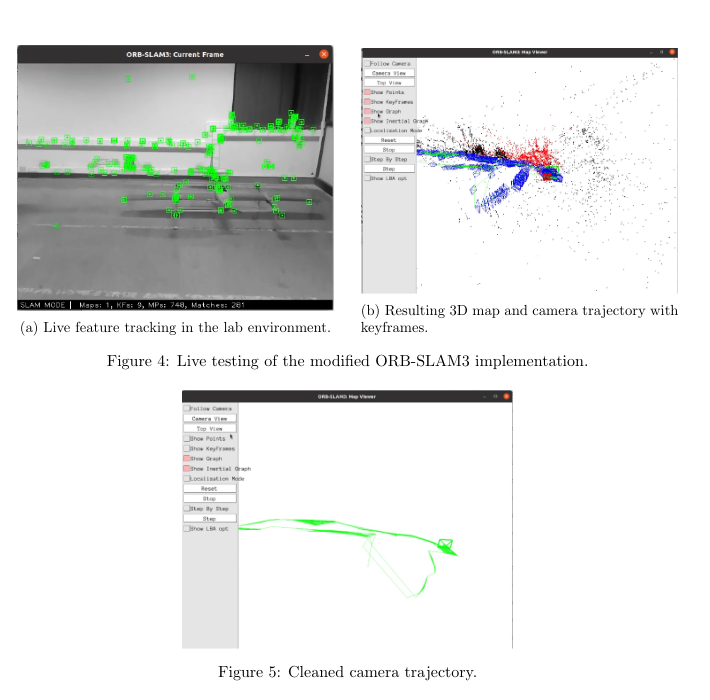
2. Played a lot with SOTA SLAM methods (ORB-SLAM and Roverslam), with some optimizations and custom additions to check.
Read my intern report - REPORT
Played around with SO100 kinematics and tried and tested sim-to-real.

Went deep into set computation and reachability using Julia. Discovered mathematical structures like sparse polynomial zonotopes and zonotopes, reading papers and implementing core functions. Implemented a new set method called Ellipsotope. GitHub Repo
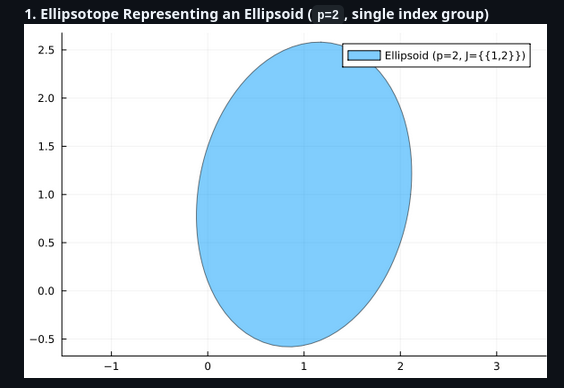
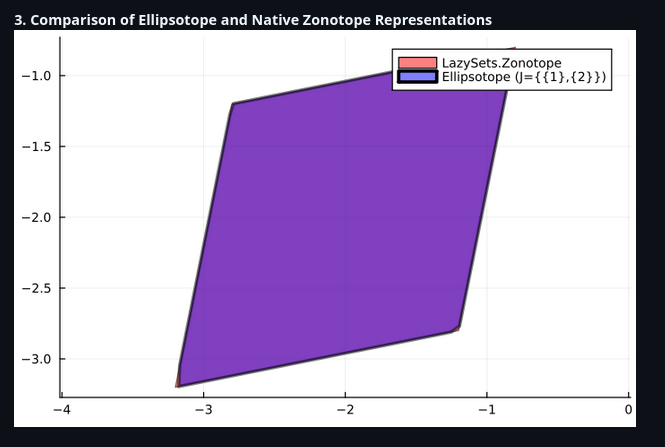
- Studied and experimented with reachability analysis and set representation.
- Implemented order reduction and set enclosures based on research papers.
- Mathematical rigor meets control theory.
- Contributions merged in LazySets.jl— GitHub
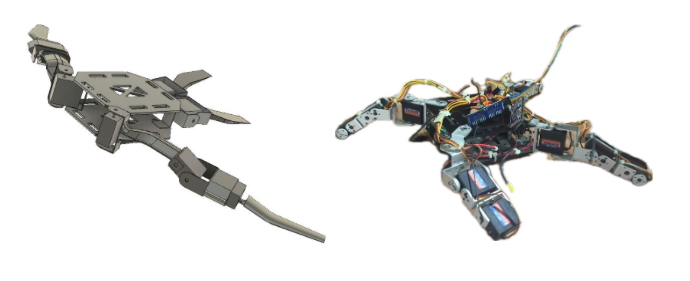
Exploring control with MuJoCo and Brax by training PPO in multi-environment setups. Currently studying quadruped dynamics, focusing on stabilizing the robot in-place.
- Training PPO using Brax.
- Experimenting with controlling and balancing a quadruped model (unitree go2).
Tried building a bio-inspired turtle.
Raised $$$$ for an animal shelter with friends in a single night 'cos we were bored.
Participated in the e-Yantra Robotics Competition (eYRC), working on autonomous drone navigation and vision tasks.

- Implemented drone control and A* path planning in ROS2.
- Used OpenCV for Aruco Marker-based object detection.
- Reached top 30 out of 600+ teams; advanced to Stage 2.
This project was my first exposure to actually working with LLMs. Implemented Retrieval-Augmented Generation (RAG) with Qwen2.5-Instruct to chat with BeagleBoard documentation.
- Built a RAG tailored to BeagleBoard documentation.
- BeagleMind
Worked on a 3-DOF robotic arm project with ROS2 and Gazebo. Interfaced with microcontrollers via micro-ROS.
- Forward and inverse kinematics implemented.
- Simulation with ROS2 Humble and Gazebo.
- Communication using micro-ROS.
This was the start of my journey in controls.
- Designed and implemented an LQR controller in ESP-IDF.
- Stepper motor control with FreeRTOS on ESP32 and MPU6050 feedback.
- Simulated and tuned system parameters in MATLAB.
- Fixed and revived an old 3D printer — Read the blog
- Taught Control (LQR, MPC), OpenCV, and Mechanical Design to juniors.
- Conducted workshops and study sessions on Control and Robotics.
Currently working at a very ambitious start-up.
Awe for how mathematical models can describe and influence physical systems.
Projects in mind — from
theory to hardware.
- Hoping to bridge Julia-based computation with real-world implementation.
- MPPI.
- MORE RL MORE MODELS.